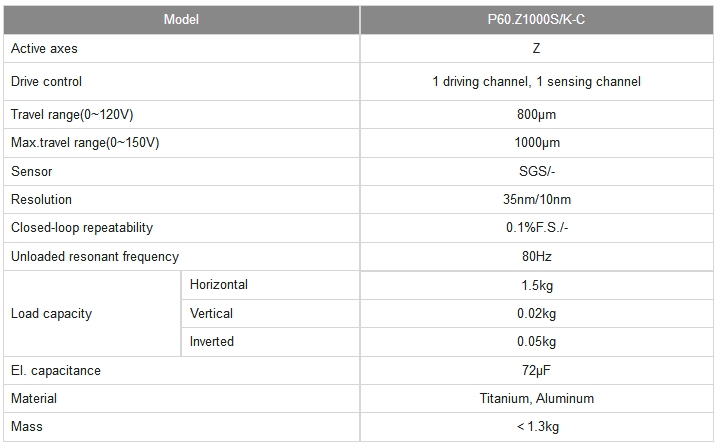
CoreMorrow P60.Z1000 Z-Motion圧電ナノポジショニングプラットフォーム、ストローク1mm
圧電セラミックスは、摩擦のない可撓性ヒンジ機構を用いて駆動される。機構の増幅駆動形式は物置台の大行程精密位置決め運動の実現を助け、行程範囲は1 mmに達することができる。1.5 kgまでの負荷に耐えることができ、これは大きなストロークと大きな負荷を同時に持つことを意味します。この製品は閉ループ精密位置決め制御用の高精度センサを搭載することができる。光学、半導体、航空宇宙、生物医学などの分野に広く応用できる。製品は下図のようになります。

特徴
Z軸ストローク1000μm達成
積載量1.5 kg
ミリ秒応答時間
閉ループの繰返し精度が高い
オプションの閉ループセンサ
真空バージョンが使用可能
アプリケーション#アプリケーション#
光学測定
光学的検出
マイクロスキャン
レーザー干渉測定
バイオテクノロジー
ナノ操縦
ナノ石版法
技術データ
推奨コントローラ
E53圧電制御器はP60.Z1000圧電ナノポジショニングステーションを駆動する理想的な選択である。小型用途に特化したシングルチャネルコントローラで、コンパクトなサイズで統合しやすく、148×27.5×80 mm^3、重量350g、24VDC/1A電源です。発生した熱を素早く出力する冷却ゾーンがあります。上位機ソフトウェアは二次開発をサポートする。

詳細については、0451-86268790、17051647888(マイクロ信号)にお電話ください。
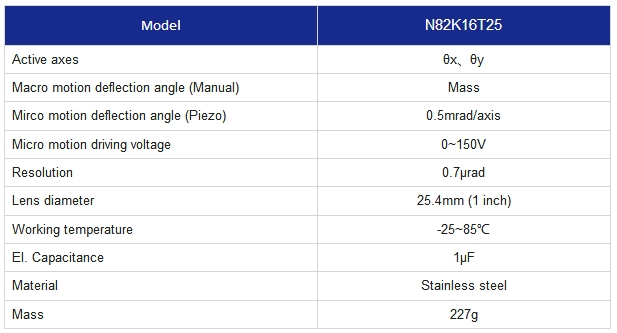
マクロ&マイクロ 2軸偏向ミラーマウント -N82K16T25
N82K16T25 は 2 軸偏向ミラー マウントで、2 つのリニア ピエゾ アクチュエータと手動粗調整およびピエゾ微調整を組み合わせて、レンズの高精度角度調整を実現します。マクロ粗調整は、ローレット部分を手動で回転させることにより、外部シェルの高精度マイクロ スレッドを介して実現され、マクロ調整角度は最大 ±4°/軸です。マクロ調整にはロックナットが装備されており、マクロ調整の位置をロックできます。ピエゾ微調整部分はPZTピエゾセラミックによって駆動され、電圧を印加することで微調整動作を実現します。マイクロ調整角度は最大0.5mrad/軸(≈103秒)です。手動の粗調整で大きなストローク調整を実現し、ピエゾ微調整でナノレベルの変位と精度を実現できます。ピエゾ微調整は、大きなストロークと高精度のアプリケーションで広く使用されています。製品を次の図に示します。

特徴
· 手動とピエゾ制御の組み合わせ
· θx と θy の偏向角は手動で調整可能
· 手動調整角度範囲は 0~±4°/軸
· ピエゾ調整角度範囲は 0~0.5mrad/軸
· 標準搭載可能レンズ径 25.4mm (1 インチ)
· カスタマイズ可能
· 真空バージョンも利用可能
用途
· ビーム安定化
· 実験室システム構造構築
· 光学
· 科学研究
· ミラーの 2D 偏向調整
技術データ
推奨コントローラ
E70 は、高出力、低消費電力、高帯域幅、低リップルノイズを備えた小型 3 チャンネル ピエゾ コントローラです。コントローラは DC24V 電源を採用し、デジタルおよびアナログ制御機能を統合し、オプションでオープン/クローズド ループ、RS-232/RS-422/USB 通信を利用可能で、PZT およびセンサー ミニ インターフェイスを統合して簡単に接続でき、外部制御機能を設定できるため、操作が非常に簡単です。

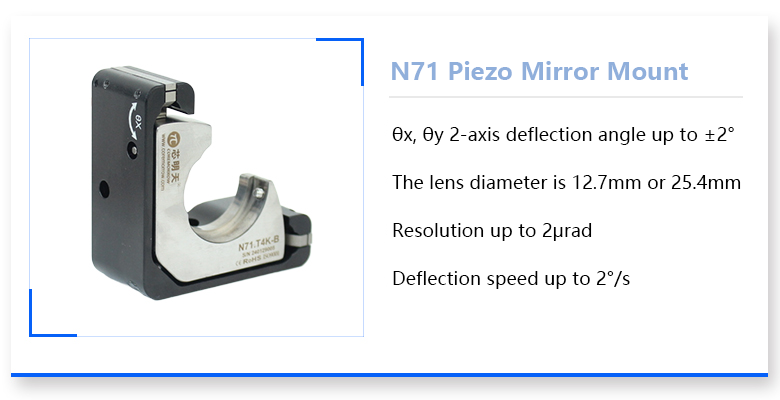
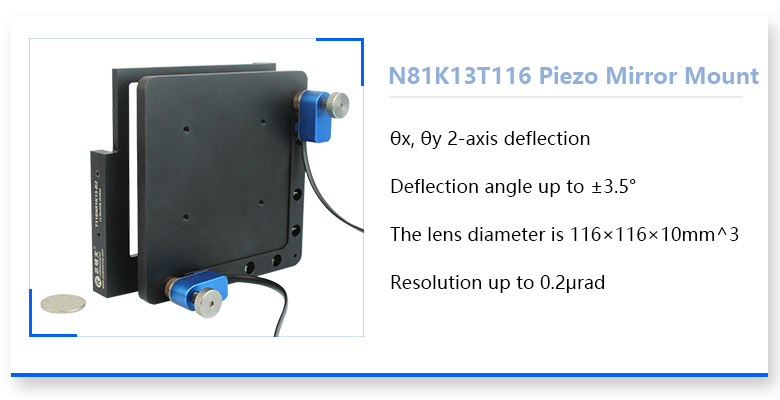
CoreMorrow ピエゾミラーマウント



詳細については、CoreMorrow(0451-86268790、17051647888(Wechat ID))までお問い合わせください。
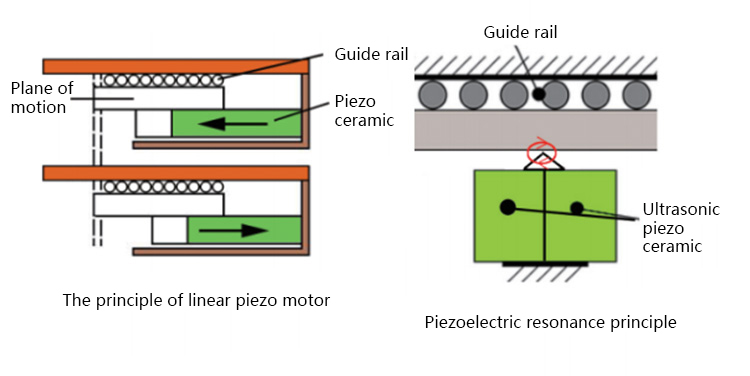
超音波共振駆動リニア/360°回転ピエゾモーター
超音波共振によって駆動されるピエゾモーターの基本的な動作原理は、圧電材料の逆圧電効果を利用することで、超音波周波数の機械振動を発生させ、摩擦駆動の構造設計によって、運動プラットフォームを回転または直線運動に駆動することができます。
超音波は人間の可聴域を超えた高周波振動の一種であるため、超音波ピエゾモータは低騒音という特徴を持つ。また、構造が小さく、応答速度が速く、パワーオフ・セルフロックなどの利点がある。精密加工測定器、半導体加工装置、医療、航空宇宙などのハイテク分野で幅広い応用が期待されている。
コアモロー超音波共振ピエゾモーター
01 N59 ピエゾリニアモータ
外観
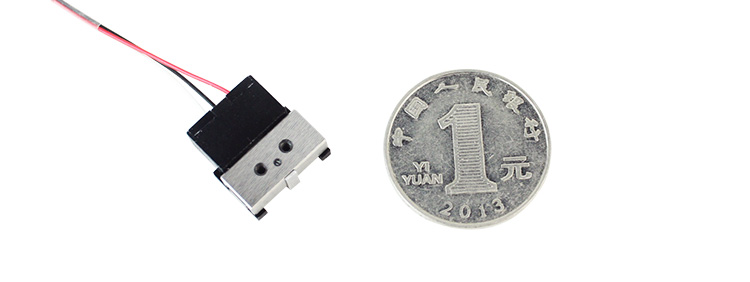
特徴
- X方向の動き
- 最大速度25mm/s
- 最大50nmの分解能
- 静止時セルフロック
アプリケーション
- 光学機器
- 精密機器
- 医療機器
- マイクロドーズシリンジ
- 小荷重・大移動のナノ位置決め
- 科学研究
- 光ファイバードッキング
- 微細加工
- 原子間力顕微鏡
- 半導体の精密位置決めとマイクロ/ナノ操作
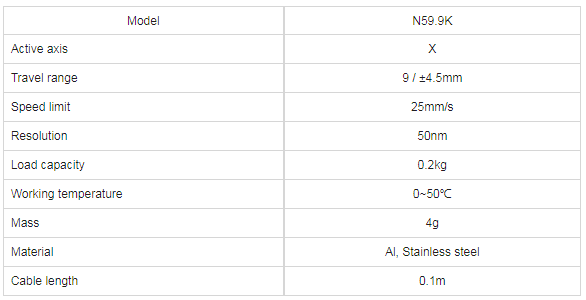
技術データ
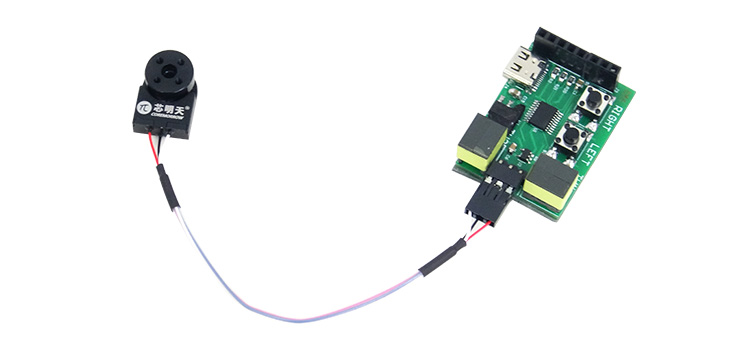
02 N69 ピエゾ回転モーター
外観
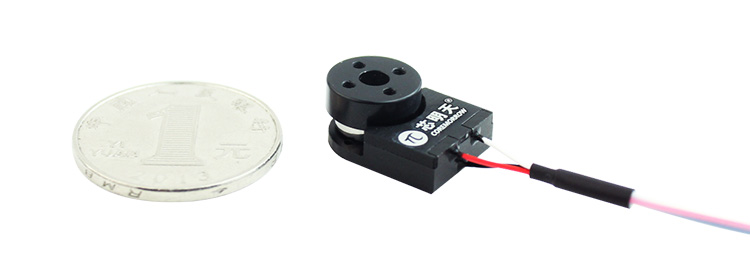
特徴
- 360°回転運動
- 最高速度220rpm
- 静止時セルフロック
- 真空バージョン(オプション
アプリケーション
- 光学機器
- 精密機器
- 医療機器
- マイクロドーズシリンジ
- 半導体技術
- 画像処理
- ナノメトリクス
- 光学機器製造
- 干渉計など
技術データ
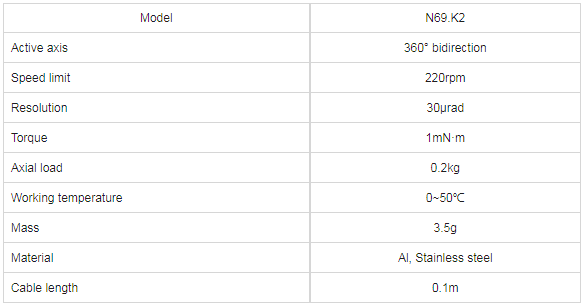
推奨コントローラー
E66.A2K-H1ボードカセットピエゾコントローラは、シングルチャネルとオープンループでN69とN59超音波ピエゾモータを制御することができます。外部入力のPWM信号で制御でき、操作がより便利になります。38mm×27mm×12mmの小型サイズで、組み込みが容易です。
詳しくはコアモロー(0451-86268790、17051647888、Wechat ID)までお問い合わせください。
S31 高速・高精度光路偏向調整用小容量ピエゾチップ/チルトプラットフォーム
光通信、光像安定化、レーザー加工、レーザービーム結合などの光応用において、光路調整は不可欠なプロセスであると同時に、漸進的な最適化プロセスでもあり、常に光路を調整し、光の伝搬経路を最適化する必要がある。光は電磁波の形で伝わり、波長は一般的にミクロンからナノメートルの間であるため、光路調整には通常、より正確な結果を得るために、非常に高い精度と速い応答速度が求められます。ピエゾチップ/チルトプラットフォームは、光路調整に高精度、高速反応速度、高周波を提供することができ、閉ループ制御システムは、正確な位置決めと制御を達成するために、さらに高い位置決め精度を有する。
S31ピエゾチップ/チルトプラットフォーム
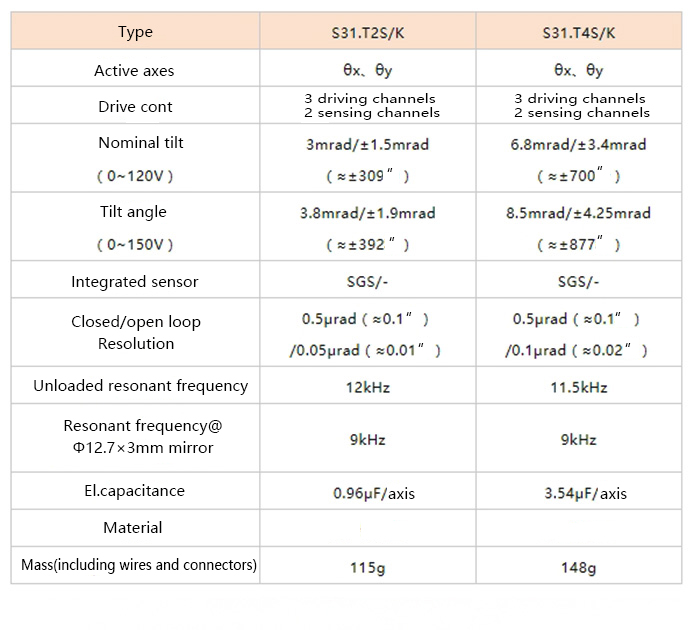
S31は大ストロークの2軸ピエゾチップ/チルトプラットフォームで、内部にノーリターンエラーフレキシブルヒンジ平行ガイド構造を採用し、θx, θy軸が同じ高性能を持ち、高い動作精度と安定性を確保しています。たわみ角は最大8.5mradで、内蔵の高精度センサーによりクローズドループの分解能は最大0.5μradです。φ12.7mmレンズを搭載し、2軸偏向モーションに対応。コンパクトな構造設計と体積の小型化により、より小型化、高速化、高精度化されたアプリケーションシナリオに対応できます。製品は下図の通りです。

特徴
2最大8.5mradの軸偏向範囲
分解能最大0.05μrad
最大12kHzの無負荷共振周波数
アプリケーション
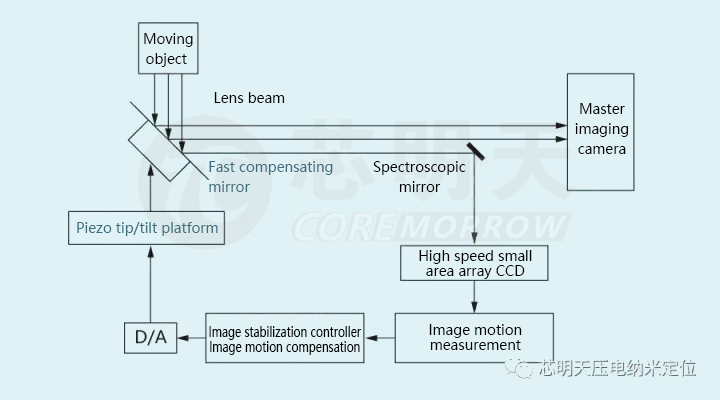
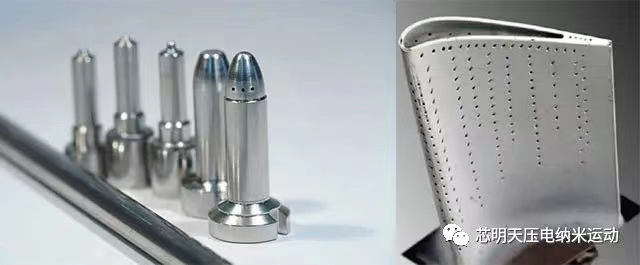
1.光学撮像: 光学撮像のプロセスでは、プラットフォームの振動や姿勢の不規則な乱れなどの様々な影響要因により、カメラの光軸がオフセットされるため、ターゲットと集光面の相対的な動きにより画像シフトが生じ、撮像のあいまいさにつながる。ピエゾチップ/チルトプラットフォームは、リアルタイム撮影画像と基準画像との間の相対的な変位を補正し、一定の露光時間内に高解像度の画像を得ることができるようにするために使用されます。
2.レーザー加工: ピエゾチップ/チルトプラットフォームは、開口部と穴の距離をミクロン単位で加工する高精度超高速レーザー加工アプリケーションへの統合に非常に適しています。ピエゾチップ/チルトプラットフォームの高精度と高速応答により、加工精度が低く、小さな穴の開口部が滑らかでないという問題を解決することができます。
技術データ
推奨コントローラー
E80.D3S/K-O ピエゾコントローラ
E80.D3S/K-Oコントローラは、主にピエゾチップ/チルトプラットフォームを駆動するために設計されています。3つの出力チャンネルがあり、3番目の出力は定電圧出力で、差動駆動に適しています。アナログ閉ループ、デジタル制御、帯域幅10kHzで、20~30VDCの電源を使用します。シャーシパッケージとボードカセットの2種類があります。

E80.B5Sボード カセットコントローラー
2つのピエゾチップ/チルトプラットフォームを同時に駆動するように設計された5チャンネル出力ピエゾコントローラです。DC28V電源を使用し、出力電圧は-20V~120V(オプションで-20V~100V/150V)、サイズはわずか222 x 180 x 40mm^3、小型のボードカードフォームの特徴で、限られたアプリケーションスペースの問題を解決します。E80.B5Sは特殊部品と特殊加工を採用しており、航空宇宙用途に適しています。
P65.XY200Z50ナノメータ測定用途のための高精度圧電ナノポジショニングテーブル
ナノメータリングはナノスケールの高精度測定技術であり、主にサイズと変位の測定とナノスケールの精度を持つ表面形態の測定を含む。ナノ科学の急速な発展に伴い、ナノ技術は高精度、高解像度の方向に発展しており、計器測定装置は数十ミクロンの範囲内でサブナノメートル以上の測定解像度を実現している。航空宇宙、半導体、光学、医療、バイオテクノロジーなどの分野に広く応用されている。
ナノメータリングにおけるP 65ナノポジショニングプラットフォームの使用
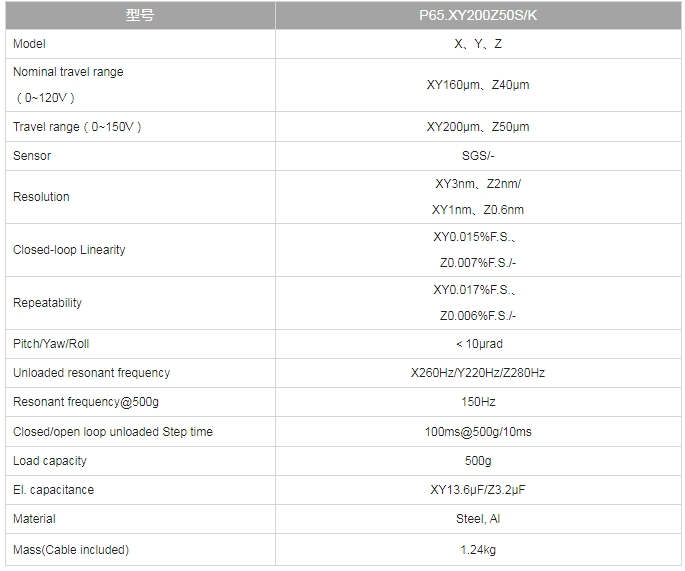
P65.XY200Z50圧電ナノポジショニングプラットフォームは圧電アクチュエータによって駆動され、フレキシブルヒンジ機構と結合してXYZ運動を実現する。このプラットフォームは高性能圧電セラミックスを内蔵し、最大変位200μmを実現でき、閉ループ繰り返し位置決め精度は0.006%F.Sに達し、分解能は0.6 nmに達した。その体積は小さく、ナノメータリング応用と高精度と分解能を必要とする位置決め応用に非常に適している。下図のように。

特徴
XYZ運動
ストローク範囲:XY 200μm/Z 50μm
負荷能力500 g達成
開閉リング
オプションの真空バージョンとカスタム仕様
適用#テキヨウ#
ナノメータリング/測定、レーザ干渉測定、ナノリソグラフィ、走査顕微鏡、ナノポジショニング、ナノ操作技術など。
技術データ
サポートコントローラ
圧電ナノポジショニングステーションは、E 00.D 12 AL−V 4圧電コントローラと一緒に使用して、より良い性能を得ることができます。E 00.D 12 AL-V 4は8つのチャンネルがあり、電源電圧はAC 220 V、帯域幅は10 kHzである箱型圧電コントローラである。アナログやデジタル信号で制御したり、RS-232、RS-422シリアルポートやUSBシリアルポートで上位機通信を行ったりできます。閉ループサーボ制御もできます。他のタイプの圧電製品や双極圧電製品などを駆動することもできます。

詳細については、0451-86268790、17051647888(ウィーチャットID)に電話してCoreMorrowに連絡してください。
圧電線形ナノ運動と二次元光学ステントの結合によりθxとθy偏向と高速光学位相シフトを実現した
光学位相シフタは光学信号の位相シフトを実現するための光学位相制御用光学デバイスであり、干渉測定技術分野に広く応用されている。技術の進歩に伴い、干渉測定技術のストローク、精度、感度に対する要求はますます高くなり、移相器は干渉測定技術の重要な構成部分として、改善も必要である。
線形圧電アクチュエータは二次元手変調フレームと結合し、θxとθy偏向を実現し、圧電アクチュエータは精度が高く、応答が速いという利点があり、電圧制御によって調節することができ、超高速(μs級)ステップ調節を実現し、大角度調節範囲と高速光位相シフトの要求を満たす。しかも小型で操作しやすい。
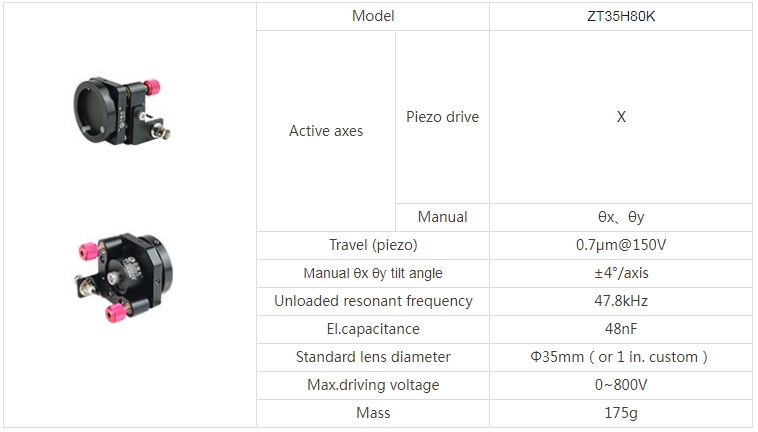
ZT35H80K圧電位相シフタ
ZT35H80K圧電位相シフタは、直流電圧信号を介して圧電管により駆動され、150 Vで約0.7μmの変位を示す。最大駆動電圧800 Vでは、3.73μmの変位が可能である。θx、θyの手動偏向角は±4°に達することができる。標準搭載可能レンズ径はφ35 mmで、カスタマイズ可能。
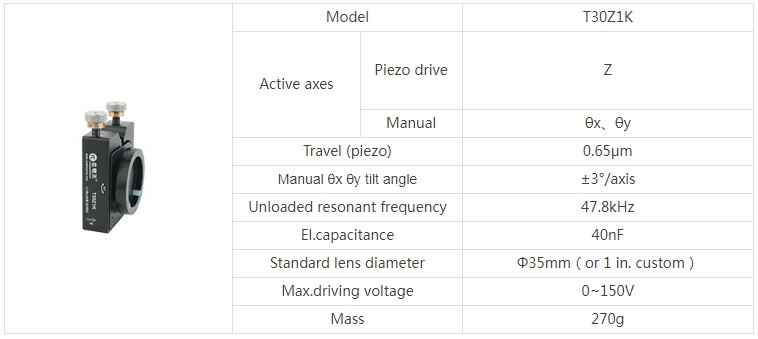
T30Z1K圧電位相シフタ
T30Z1K圧電位相シフタは、直流電圧信号を介して圧電管によって駆動され、変位は約0.65μm@150 Vである。θxとθyの偏向角は手動で調整でき、角度調整範囲は±3°に達することができる。レンズ調整と画像移動を組み合わせて、より小さく、よりコンパクトにし、画像移動や干渉測定などの応用に便利にします。
ZT50M14圧電アクチュエータ
ZT50M14圧電アクチュエータは光学ケージ応用のために設計され、ケージ構造に直接取り付けることができる。圧電アクチュエータを手動で調整するレンズアクチュエータに統合します。まず、2次元ホルダによりレンズの方向を手動で調整し、範囲を±3°に調整した後、圧電アクチュエータによりナノ精度の線形運動を行った。圧電アクチュエータには様々なモデルがあり、様々な変位の中から選択することができます。最大ストローク範囲は114μmに達し、オプションの閉ループセンサー付き。

CoreMorrowは移相、ステップ、干渉、測定などの応用のために各種の圧電移相器を提供し、例えば小体積移相器、軽通、大負荷、大径移相器、すべてのモデルは顧客の応用に基づいてカスタマイズすることができる。
推奨コントローラ
E53.Dシングルチャネル圧電コントローラはCoreMorrow圧電位相シフタの駆動に適しており、電源24 VDC/1.5 A、帯域幅10 kHz、アナログまたはデジタル制御に適しており、オン/クローズバージョンを選択可能である。小型アプリケーション用に開発されたコンパクト構造で、統合が容易です。

詳細については、0451-86268790、18944636468(ウィーチャットID)に電話してCoreMorrowに連絡してください。
CoreMorrow圧電ナノプローブ台
圧電ナノプローブ台は、主に圧電モーターと圧電セラミックスによって駆動されるプローブで構成されている。新材料、新エネルギー、半導体、生物医学、基礎科学研究などの最先端分野に広く応用できる。その主な役割はナノスケールの物理測定とナノスケールの運動を完成し、三軸の正確な位置決めを実現できることである。分析機器技術の発展と応用シーンの拡大に伴い、圧電ナノプローブ台はすでに分析機器の重要な構成部分となっている。
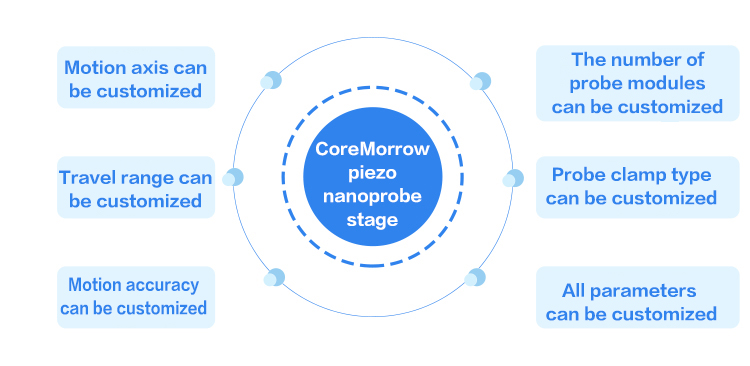
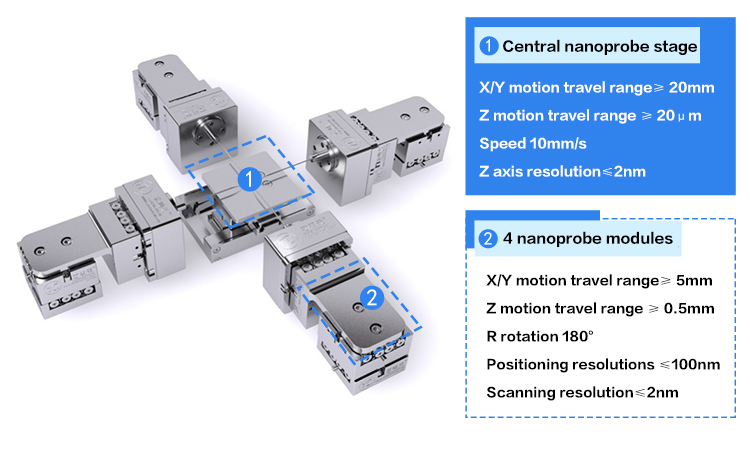
CoreMorrow圧電ナノプローブテーブルには、さまざまな運動形式があり、運動サイズ、方向、範囲、精度、プローブモジュールの数、プローブ治具のタイプは、ご希望に応じて任意に選択できます。中心プローブプラットフォームと4つのプローブモジュールを備えたナノプローブシステムを紹介します。
CoreMorrow圧電ナノプローブ台
CoreMorrow圧電ナノプローブ台には中心プローブがあり、下図に示すように4つのナノプローブモジュールが搭載されています。
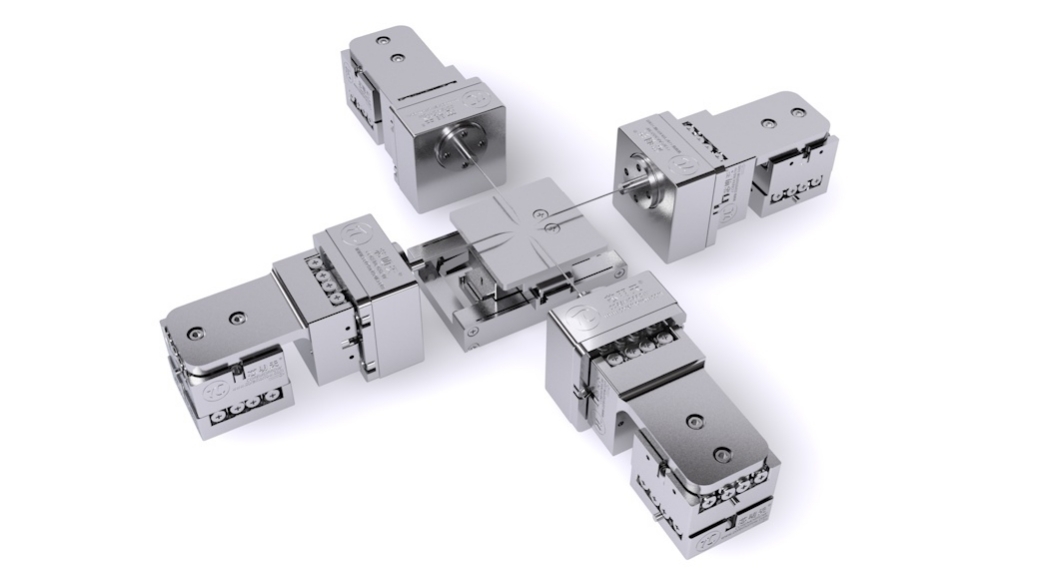
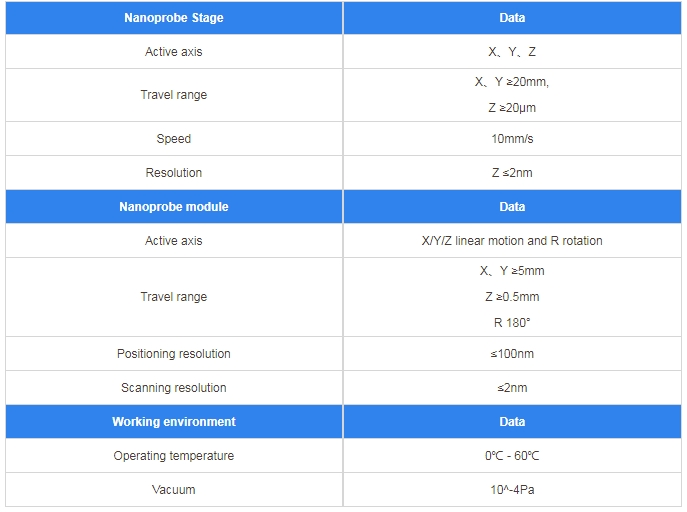
中心プローブ台はXYZ三軸運動、XY運動行程≧20 mm、Z運動行程≧20μmを行うことができる。それは低温真空環境に使用でき、温度範囲は0℃から60℃で、真空度は10 ^-4 Paである。4つのプローブモジュールはXYZ線形運動とR回転を行うことができ、XYストローク≧5 mm、Zストローク≧0.5 mm、プローブR回転は180°に達することができる。
特徴
各プローブには7つの運動寸法がある
ミリ運動とミクロン運動を結合する
Mmストローク≧20 mm
高精度≦2 nm
動作温度範囲は0℃〜60℃である
最大10 ^-4 Paの真空条件でカスタマイズ可能
運動軸、ストローク、速度、寸法、固定コネクタなど、カスタマイズ可能
適用#テキヨウ#
半導体業界
電気性能試験と分析
ざいりょう
新エネルギー
物理学
生物医学など。
技術データ
推奨コントローラ
E53.D E圧電制御器はCoreMorrow圧電ナノプローブ台の駆動に適している。デジタル制御、閉ループサーボまたは開ループ制御を採用し、体積が小さく、105×103×30.1 mm ^ 3しかなく、コンパクト型圧電ナノプローブ台に適しています。

詳細については、0451-86268790、17051647888(ウィーチャットID)に電話してCoreMorrowに連絡してください。